.png)
Synthetic Data in Computer Vision Annotation: How It Works and When to Use It

Manual image annotation is expensive, slow, and inconsistent at scale. Drawing bounding boxes around 50,000 product images, segmenting defects on a factory line, or labeling pedestrian poses across millions of video frames - each of these requires hours of human attention, careful quality control, and enough real-world data to cover the variation your model will actually encounter in deployment.
Synthetic data addresses all three problems at once. Generated from 3D scenes, physics simulations, or generative models, synthetic images come with automatic, pixel-perfect annotations. No crowdsourcing, no inter-annotator disagreements, no waiting for rare events to occur in the field. The question isn't whether synthetic data belongs in computer vision pipelines in 2026 - it clearly does. The question is how to use it without introducing the failure modes that catch teams off guard after deployment.
Key points
- Synthetic data for computer vision is artificially generated imagery - from 3D rendering engines, GANs, diffusion models, or simulation - that comes with automatic annotations as part of the generation process.
- The primary advantage over real data annotation is not just cost - it's coverage. Synthetic pipelines can generate rare events, specific lighting conditions, and edge cases that real-world data collection cannot reliably produce.
- Auto-annotation is the defining feature: because the generator has full scene knowledge, every bounding box, segmentation mask, depth map, and pose label is produced at pixel-level precision without human involvement.
- The main risk is sim-to-real transfer: models trained on synthetic data sometimes underperform on real images due to distribution mismatch in texture statistics, lighting behavior, and rendering artifacts.
- Most production pipelines in 2026 are hybrid - synthetic data for volume and edge case coverage, real data for distribution anchoring and fine-tuning.
- For product visual AI, the same 3D assets that power a configurator or ecommerce platform can generate training datasets for object recognition and AR. Vivid3D's Simulation Generator is built on exactly this workflow.
Why Annotation Is the Bottleneck in Computer Vision
The model architecture is rarely what limits a computer vision project. The data is. Specifically, the annotation: getting enough correctly labeled images to train a model that generalizes across the conditions it will actually encounter.
Real-world annotation has three structural problems that don't get better with more budget:
Scale costs grow linearly. If you need 10x more training examples, you need roughly 10x more annotation time. There's no compounding efficiency. For large product catalogs - thousands of SKUs across hundreds of visual variations each - this math becomes prohibitive quickly.
Rare events are structurally underrepresented. A quality inspection model needs to recognize defects. But defects, by definition, are rare. You might see 200 real examples of a specific weld defect in a year of production. That's not enough to train a robust detector, and you can't manufacture failures on demand. The same applies to accident scenarios in autonomous driving, specific disease presentations in medical imaging, or unusual weather conditions in agricultural CV.
Human annotation introduces inconsistency. Two annotators drawing bounding boxes around the same object will produce slightly different results. At scale, across multiple annotation vendors and review cycles, these inconsistencies accumulate into noise that degrades model performance in ways that are hard to diagnose.
Synthetic data addresses all three directly - not by eliminating them, but by changing the cost structure and coverage profile enough that the tradeoffs become workable.
What Auto-Annotation Actually Means
The most practically significant feature of synthetic data for computer vision is auto-annotation: the generator produces labels as a natural byproduct of the generation process, at no additional cost and with no human involvement.
In a 3D rendering pipeline, the scene engine knows exactly what object occupies every pixel. It can emit bounding boxes, segmentation masks, instance IDs, depth maps, surface normals, and 6DOF pose data for every rendered frame, because these are derived directly from the scene geometry rather than inferred by a human annotator. The annotation is not added after the fact - it is part of the rendering output.
This is a genuinely different quality of annotation from human labeling. There's no ambiguity about where one object ends and another begins. There's no inconsistency between annotators. The segmentation mask is pixel-perfect because the renderer knows exactly which pixel belongs to which object. At high volumes, this compounds into a significant quality advantage: a dataset of one million synthetic images with perfect auto-annotations will have lower annotation noise than a dataset of the same size produced by a human annotation pipeline under real operational conditions.
The catch is that "perfect" applies only to what the generator explicitly models. If the 3D scene doesn't include motion blur, the annotations won't cover it. If the material library doesn't include a specific surface texture, the model won't learn to handle it. The generator's blind spots become the dataset's blind spots - and unlike human annotation errors, which are distributed randomly, synthetic generation gaps are systematic and affect the entire dataset.
Generation Methods and What They Produce
3D Rendering and Physics Simulation
For structured object recognition tasks - product identification, quality inspection, robotics perception, AR placement - 3D rendering is the dominant approach and the one with the best annotation quality. A 3D scene is constructed with the target objects, lighting conditions, backgrounds, and camera parameters are varied programmatically, and the renderer produces labeled images at scale.
The annotation output is complete: bounding boxes, instance segmentation, keypoints, depth maps, and surface normals - all generated from scene geometry. Generation parameters can be scripted to ensure systematic coverage: every object at every angle, every material variant, every lighting condition the deployment environment might present.
Platforms like NVIDIA Isaac Sim demonstrate this at scale for robotics - generating dense multi-modal annotations including 2D and 3D bounding boxes, segmentation, depth, and sensor data from configurable 3D environments. The same principle applies to product visual AI, where 3D models of products can generate training sets covering all required visual conditions before a single real image is captured.
GANs and Diffusion Models
Generative adversarial networks and diffusion models take a different approach: they learn the visual distribution from real images and generate new samples that follow the same distribution. The annotation challenge here is that these models generate pixels, not scene graphs - so annotation must be handled separately, either by inheriting labels from the real training data or by combining generation with a segmentation model to annotate the outputs.
GANs are most useful for augmentation: taking an existing annotated real dataset and expanding it with visually similar synthetic samples. Diffusion models produce higher-quality images but are slower and more compute-intensive. Neither approach provides the automatic dense annotation that 3D rendering delivers - they are better understood as tools for expanding visual diversity within a known distribution than for generating labeled datasets from scratch.
Domain Randomization
Domain randomization is not a generation method so much as a strategy applied on top of 3D rendering: deliberately introducing extreme visual variation in textures, lighting, materials, and backgrounds during synthetic training. Rather than trying to make synthetic images photorealistic, domain randomization makes them highly diverse.
The theory is that a model exposed to enough visual variation during training will develop features robust enough to handle real-world inputs, even if no individual synthetic image closely resembles real data. This approach was demonstrated convincingly by OpenAI's research on transferring robot policies from simulation to reality using domain randomization - training entirely on synthetic data with aggressive visual variation produced policies that transferred to physical robots without any real-world training data.
The Annotation Pipeline: How It Works in Practice
.png)
A synthetic annotation pipeline for computer vision typically follows a sequence that differs significantly from a real-data annotation workflow:
1. Define the annotation requirements first. Before any generation happens, the team specifies what annotations the model needs: bounding boxes only, or also segmentation masks? 2D or 3D? Pose labels? Depth? The generation pipeline is built to produce these outputs as native metadata - not as a downstream labeling task.
2. Build or acquire 3D assets. For rendering-based pipelines, this means having high-quality 3D models of the objects the model will recognize. For product recognition, these are often the same assets already used for ecommerce configurators or marketing rendering - a significant operational advantage for manufacturers already managing a 3D asset library.
3. Define the generation parameter space. This is where the annotation strategy lives. What range of lighting conditions should the model handle? What backgrounds? What object orientations? What occlusion patterns? The parameter space defines the coverage the dataset provides.
4. Generate at scale with automatic annotation export. The rendering engine produces images and annotation files simultaneously. Common output formats include COCO JSON, Pascal VOC XML, and YOLO label files.
5. Validate against real-world distribution. This is the step most teams underinvest in. A sample of generated images should be reviewed by domain experts to confirm that scenes are plausible and that the generated distribution covers conditions actually encountered in deployment.
6. Fine-tune on real data. Most production pipelines follow a pretraining-then-fine-tuning pattern: train the model on the full synthetic dataset to build general visual representations, then fine-tune on a smaller set of real annotated images to adapt to the specific characteristics of the deployment environment.
Hybrid Pipelines: Synthetic and Real Together
The "synthetic vs real" framing is mostly a distraction. The teams building the best-performing computer vision models in 2026 aren't making a binary choice - they're designing pipelines that use each type of data where it has the highest leverage.
Pretraining on synthetic, fine-tuning on real
Train the model on a large synthetic dataset to learn general object representations, then fine-tune on a smaller real dataset to adapt to deployment-specific visual characteristics. This works well when real annotated data is expensive or limited. The synthetic pretraining phase handles the volume requirement; the real fine-tuning phase handles the distribution alignment requirement.
Targeted augmentation
Use real data as the primary training source, but add synthetic samples specifically for edge cases and underrepresented conditions. If the real dataset has 50 examples of a specific defect type, synthetic generation can expand that to 5,000 with controlled variation. This approach keeps the primary distribution anchored in reality while improving coverage of the long tail.
Active learning loops
Deploy a model trained on synthetic data, identify the real-world inputs where it underperforms, and generate targeted synthetic data to cover those specific failure modes. This creates a closed loop: deployment reveals gaps, synthetic generation fills them, retraining improves the model, repeat. The loop converges toward a model that handles real-world conditions it was never directly trained on.
Sim-to-Real Transfer: The Technical Problem and Practical Solutions
.png)
Sim-to-real gap is the persistent challenge of synthetic CV pipelines: a model that performs well on synthetic test data underperforms when evaluated on real images. The gap exists because rendering engines and physical cameras differ in ways that matter to neural networks even when they don't matter to humans.
Texture statistics differ. Rendered surfaces have different frequency distributions than photographed surfaces. Lighting behaves differently in simulation than in real scenes with global illumination, inter-reflections, and environmental occlusion. Rendered edges are often too clean; real images have blur, compression artifacts, and sensor noise that the model needs to handle.
Several techniques reduce the gap:
- Domain randomization: aggressive variation in synthetic appearances forces the model to develop robust features that don't rely on rendering-specific cues
- Style transfer / domain adaptation: transform synthetic images to look more like real images before training, using CycleGANs or similar approaches
- Photorealistic rendering: invest in higher-fidelity rendering with physically based materials, global illumination, and realistic sensor simulation to reduce the domain gap at the source
- Mixed training: include real images in training from the start, even in small proportions, to anchor the model's representations in real-world statistics
- Real-data fine-tuning: accept the gap in pretraining but close it through fine-tuning on a curated real dataset before deployment
The gap is narrowing as rendering quality improves and as domain adaptation techniques mature. At CVPR 2026's Workshop on Synthetic Data for Computer Vision, domain gap reduction was identified as one of the primary open research problems - which is an accurate reflection of both how important the problem is and how much progress is being made.
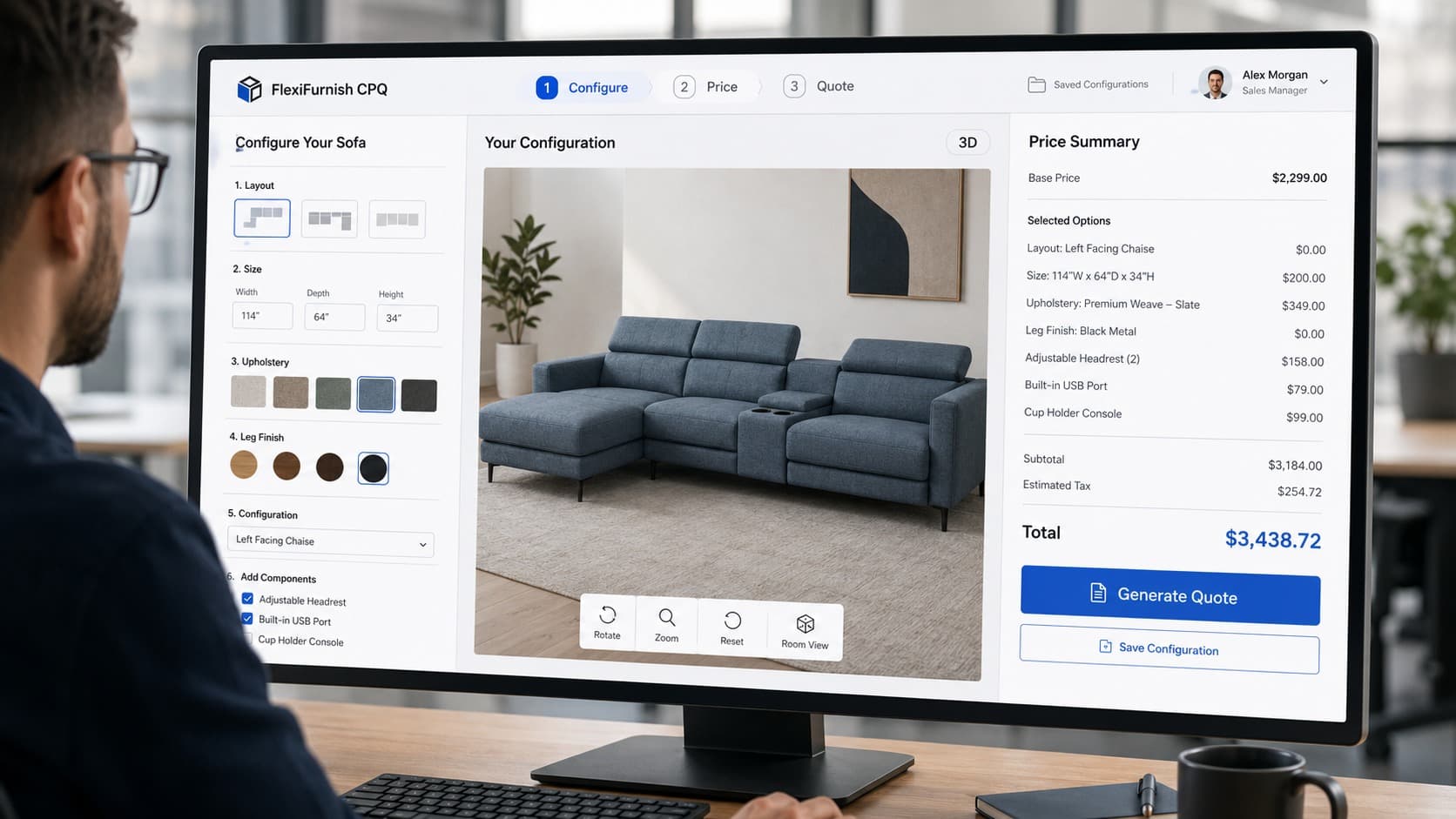
Product Visual AI: Where 3D Assets and CV Training Data Converge
For manufacturers and retailers building computer vision capabilities alongside their commerce stack, there's a compelling operational convergence available that most teams haven't fully exploited.
The 3D models that power a product configurator - the same assets that render swatches and generate marketing imagery - are also the ideal source for CV training data. A product that exists as a governed 3D model can generate training images for product recognition, AR placement, visual search, and quality inspection, all from the same asset. The rendering parameters are different (training images need variation in lighting, angle, and occlusion; product renders need consistency and photorealism), but the 3D asset is the same.
This is the workflow behind Vivid3D's Simulation Generator: the platform uses existing product 3D assets to generate synthetic training datasets for visual AI workflows. The cost of creating and maintaining high-quality 3D models is amortized across ecommerce configurator use, marketing rendering, and CV training data generation - rather than being justified by a single downstream application. For product-heavy organizations building computer vision capabilities, this asset reuse model reduces the total cost of both the 3D content operation and the CV training data pipeline.
For more background on the generation methods underlying this, see our guide to synthetic data generation methods.
Annotation Format Reference
FAQ
What is synthetic data annotation in computer vision?
Synthetic data annotation refers to the process of generating both images and their corresponding labels (bounding boxes, segmentation masks, depth maps, pose labels) automatically as part of a synthetic data generation pipeline. In 3D rendering-based pipelines, the scene engine knows the position, identity, and geometry of every object in the scene, so it can produce pixel-perfect annotations without any human involvement. This is distinct from annotating synthetic images after the fact - the annotation is a byproduct of generation, not a separate step.
How accurate is auto-annotation in synthetic data pipelines?
For properties the renderer explicitly models - object position, class identity, surface boundaries - auto-annotation is pixel-perfect and consistent across the entire dataset. There are no inter-annotator disagreements, no labeling errors, and no ambiguity. The accuracy ceiling is determined by the fidelity of the 3D scene and the annotation types the pipeline is configured to produce. For annotation types not captured by the generator (specific semantic attributes, contextual relationships), auto-annotation has the same gaps as the generation pipeline itself.
How do you handle the sim-to-real gap in production CV pipelines?
The standard production approach in 2026 is a combination of domain randomization during synthetic generation and real-data fine-tuning before deployment. Domain randomization forces the model to develop robust features that don't depend on rendering-specific cues. Fine-tuning on a smaller real dataset adapts the model's representations to real-world image statistics. For most object recognition tasks, this combination produces models that match or approach the performance of models trained entirely on real data, at significantly lower annotation cost.
What annotation formats does synthetic data generation support?
Most 3D rendering pipelines can output COCO JSON, Pascal VOC XML, and YOLO text format for bounding box annotations. Rendering pipelines also natively produce annotation types that are difficult or impractical to generate through human labeling: pixel-perfect segmentation masks, per-pixel depth maps, surface normals, and 6DOF object pose labels. These annotation types are standard outputs of the renderer rather than add-on labeling steps.
When should I use synthetic data vs real data for computer vision annotation?
Use synthetic data when you need volume the real world can't provide at reasonable cost, when you need to cover rare events or specific conditions that don't occur frequently in real data, or when the objects you need to detect already exist as 3D models. Use real data when you need to capture genuine distribution characteristics of the deployment environment, when the task requires understanding authentic human behavior or appearance variation, or as a fine-tuning set to close the sim-to-real gap after synthetic pretraining. Most production pipelines use both.
Can I use existing 3D product models to generate CV training data?
Yes, and this is increasingly how manufacturers and retailers build visual AI capabilities alongside their ecommerce operations. If your products already exist as 3D models for configurators or marketing rendering, those assets can generate training datasets for product recognition, AR placement, and visual search - varying lighting, angle, background, and occlusion programmatically to produce the coverage a CV model needs. The same 3D asset serves the commerce stack and the AI training pipeline, which changes the economics of maintaining high-quality 3D content significantly.